

Wissenswertes über 3D-Laserscanning
Für alle, für die Laserscanning Neuland ist.
Hier erfahren Sie warum Sie davon profitieren, und wie es funktioniert.
Begleiten Sie uns, während wir gemeinsam wachsen und erfolgreich sind.
Wir freuen uns, dass Sie hier sind, um Teil unserer Geschichte zu sein.
1 Wem hilft Laserscanning?
- Sie sind Architekt und haben den Auftrag ein bestehendes Gebäude umzubauen?
Bestandspläne gibt es nicht oder sie sind überholt. Oder Sie müssen bei der Planung
Verformungen berücksichtigen.
- Sie sind Planer für Industrieanlagen (Chemie, Pharma, Wasserwerk, etc.).
Für Ihre Projekt brauchen Sie komplexe Aufmaße für alle Gewerke.
- Sie sind Betreiber einer Industrieanlage (Chemie, Pharma, Wasserwerk, etc.).
Für viele Anlagenänderungen benötigen Sie immer wieder ein Aufmaß.
- Sie sind Hauseigentümer und haben keine oder nur überholte Bestandspläne.
Für Verkauf, Sanierung oder für eine Teilungserklärung benötigen Sie aktuelle Pläne.
Oder Sie benötigen eine verbindliche Wohnflächenberechnung.
- Sie sind Immobilienverwalter. Um Ihre Gebäude modern zu verwalten benötigen Sie BIM-Modelle.
- Sie sind Denkmalschützer und benötigen eine vollständige Dokumentation Ihrer Objekte oder
Gewissheit über Gebäudeschäden in unzugänglichen Bereichen (Dächer, Türme, etc.).
- Sie sind Projektleiter und benötigen zu verschiedenen Meilensteinen den vollständigen Überblick
zum Status Ihrer Baustelle, oder zum Aufmaß der erbrachten Leistungen.
In all diesen Fällen lohnt es sich über unsere Dienstleistungen nachzudenken.
Wir erfassen Ihren Bestand komplett, exakt, digital und schnell mit Laserscanner und Drohne.
Auf Wunsch leiten wir daraus exakte 3D-Modelle oder 2D-Pläne ab.




2 Wie funktioniert's?
Der Laserscanner wird im Raum aufgestellt. Er sendet innerhalb von wenigen Sekunden Millionen von Strahlen kugelförmig in die Umgebung. Die Strahlen treffen auf Hindernisse und werden reflektiert. Der Scanner misst die Reflektionszeit der einzelnen Strahlen und ermittelt daraus die Entfernung, in der der Strahl auf das Hindernis traf.
Da er das für alle Strahlen tut, kann er für jede Messung eine sogenannte Punktewolke ermitteln. Diese Punktewolke bildet die vom Scanner erfasste Umgebung im dreidimensionalen Raum ab.
Außerdem erstellt der Scanner ein 360°-Panoramafoto.
Der Scanner wird so an vielen Punkten aufgestellt und verrichtet immer die selben Arbeiten.
Durch geschicktes Positionieren des Scanners wird das gesamte Gebäude erfasst.
Dabei sind zwei Dinge zu beachten:
- Aufnahmen in möblierten Räumen sorgen für Schatten, die vom Laserstrahl nicht erreicht
werden können. Der Scanner muss dann zusätzlich so platziert werden, dass die Schattenbereiche
beim nächsten Scan erfasst werden.
- zwei aufeinanderfolgende Scans brauchen einen ausreichend großen Überlappungsbereich
Je mehr Scanpositionen man nutzt, desto dichter und genauer wird das Ergebnis.
Wurden alle Räume gescannt, werden die Daten in der sogenannten Registrierungssoftware aufbereitet.
Hier werden alle Punkte außerhalb des Gebäudes gelöscht.
Punkte, die aufgrund von Spiegelungen in Fenstern oder Spiegeln entstanden sind, werden gelöscht.
Die einzelnen Punktewolken werden aufgrund der überlappenden Objekte so übereinander gelegt, dass eine exakte große Punktewolke entsteht (Registrierung).
Um eine möglichst realistische Darstellung zu erhalten, werden Punktewolke und Panoramabilder übereinander gelegt. Jeder Punkt wird mit der zugehörigen Farbe aus dem Foto belegt.
Die Punktewolke wird in verschiedenen Dateiformaten gespeichert, und kann problemlos in alle gängigen CAD-Programme importiert werden (ArchiCAD, Revit, E3D, Plant3D, etc.).
So entsteht ein exakter digitaler Zwilling im Maßstab 1:1. Dieser kann entweder selbst genutzt, oder in ein 3D-Modell oder in 2D-Pläne veredelt werden.
Zusätzlich zur Punktewolke kann der Nutzer alle 360°-Panoramafotos betrachten und z.B. jedes beliebige Längenmaß oder Rohrdurchmesser abgreifen. Lästige Baustellenfahrten minimieren sich dadurch.



3 Was ist anfangs abzustimmen?
Wenn Sie sich für ein vollständiges, exaktes und digitales Gebäudeaufmaß interessieren, sollten wir uns abstimmen:
- um welches Gebäude handelt es sich?
- wie groß ist der zu scannende Bereiche ?
Falls vorhanden, Pläne und Fotos zuschicken
- zu welchem Zweck benötigen Sie das Aufmaß?
- benötigen Sie darüber hinaus ein 3D-Modell oder 2D-Pläne?
Falls ja, sind Detaillierungsgrad und geforderte Verformungsgenauigkeit abzustimmen.
- sind alle relevanten Räume zugänglich?
Mit all diesen Infos erstelle ich Ihnen ein verbindliches Angebot, und wir legen einen vor-Ort-Termin fest.
4 Der Scantermin
Wenn alle Randbedingungen geklärt, und der Termin vereinbart ist, erscheine ich mit Scanner (und ggf. mit Drohne) vor Ort.
Ich brauche Zugang zu allen relevanten Räumen und zum Außenbereich des Gebäudes.
Den Laserscanner trage ich von Raum zu Raum und erzeuge eine Menge einzelner Punktewolken. Das Ganze ist gesundheitlich völlig unbedenklich, auch wenn man mal mit auf die Aufnahme kommt.
Idealerweise wurden alle störenden Gegenstände vor dem Termin entfernt. Das erleichtert alle weiteren Arbeiten (z.B. Ableiten eines 3D-Modells).
Der vor-Ort-Termin bei einem Wohnhaus dauert je nach Gebäudegröße ca. 0,5 bis 2 Tage.
Danach beginnt die Aufbereitung der Daten im Innendienst.




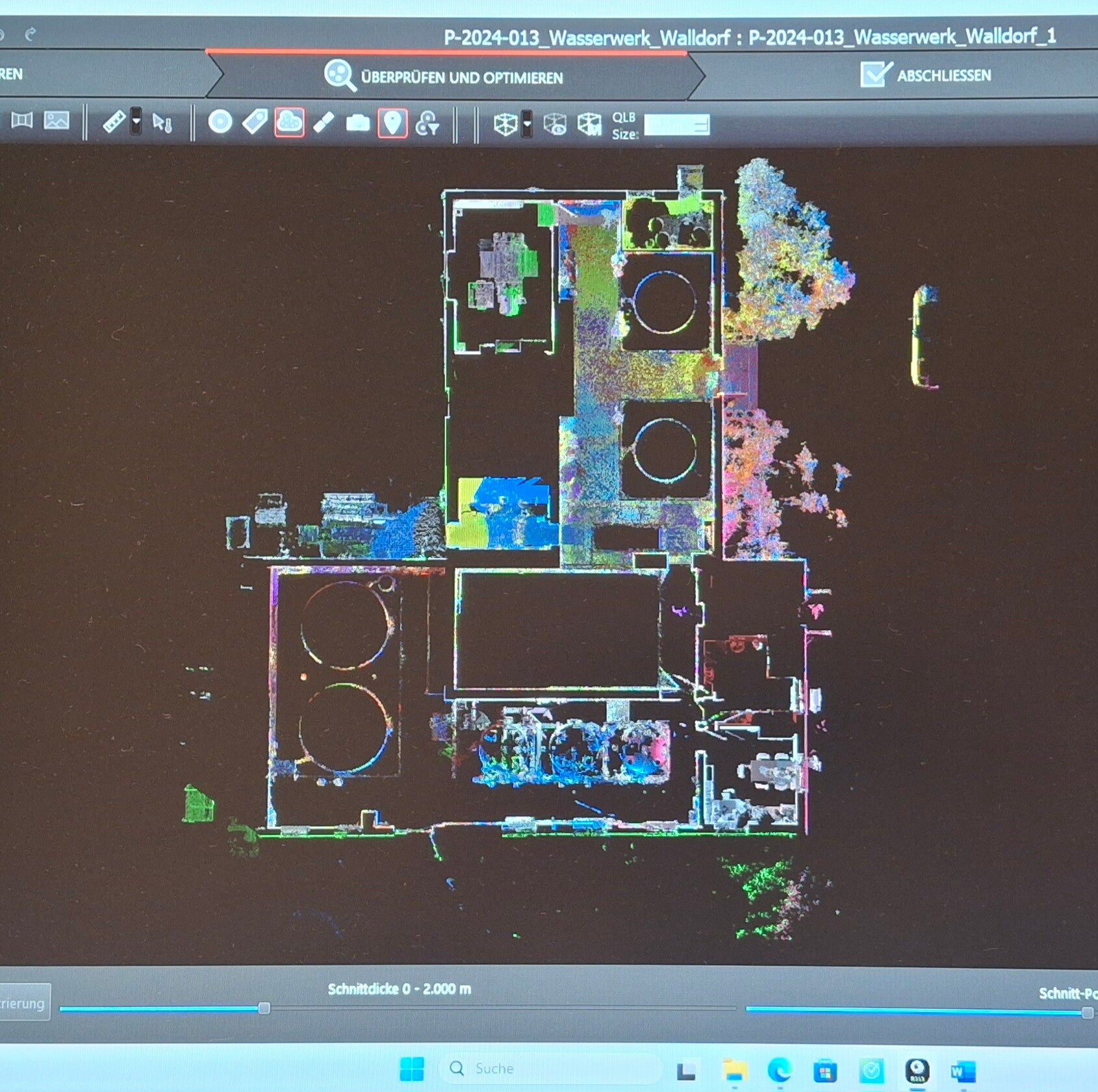
5 Punktewolke im CAD-Programm
Das Ergebnis des Scanvorgangs ist die vollständige 3D-Punktewolke des ganzen Gebäudes.
Sie wird in Ihr gewohntes CAD-Planungsprogramm importiert und lässt sich sehr einfach und schnell in beliebigen Schnitten betrachten.
Dadurch bekommt der Planer die Übersicht über alle Hauptabmessungen und Details.
3D-Modell oder 2D-Bestandspläne lassen sich so schnell erstellen.
Schauen Sie wie einfach das geht...






